-
 傎傉偟偂丂TOP儁乕僕
<<
偳傫偲偙偄PC忣曬!!
傎傉偟偂丂TOP儁乕僕
<<
偳傫偲偙偄PC忣曬!!
P-ROBO(僺乕儘儃)
P-ROBO偲偼丠
P-ROBO偲偼壗側偺偐丠
傑偢偼P-ROBO偵偮偄偰娙扨偵徯夘偟傑偡丅
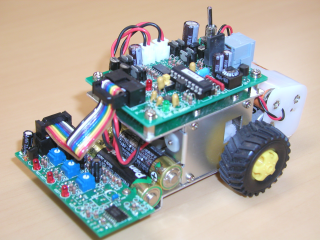
P-ROBO偼丄儚儞僠僢僾儅僀僐儞 PIC 傪搵嵹偟偨儘儃僢僩偱偡丅扨嶰揹抮4杮偱摦嶌偟傑偡丅
偙偺儘儃僢僩偼丄僙儞僒傪巊梡偟偰僐乕僗偵堷偄偨儔僀儞傪僩儗乕僗偟側偑傜憱傞偙偲偺偱偒傞丄帺憱儘儃僢僩偱偡丅
P-ROBO
P-ROBO杮懱棤懁
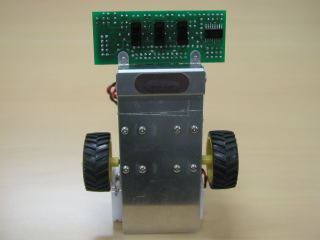
僙儞僒晹暘奼戝
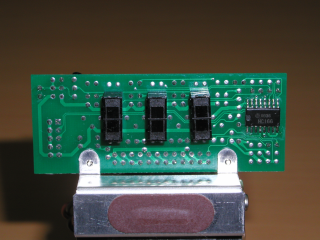
偙偺墶偵俁偮暲傫偩崟偄暔偑僙儞僒乕偱偡丅
愒奜慄LED偲僼僅僩僩儔儞僕僗僞偑堦弿偵側偭偨僙儞僒乕偱偡丅
PIC晹暘奼戝
P亅ROBO偵偼CPU偲偟偰丄儚儞僠僢僾儅僀僐儞PIC傪巊梡偟偰偄傑偡丅Ver1.5偲彂偐傟偨IC偑PIC(PIC16F84)偱偡丅

P-ROBO 峔惉恾
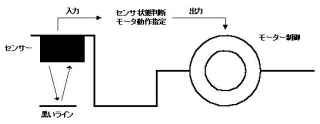
P-ROBO偼杮懱壓曽偵愙懕偟偨愒奜慄LED偐傜愒奜慄傪敪岝偟丄崟偄儔僀儞偵斀幩偟偨僼僅僩僩儔儞僕僗僞偺怣崋傪庴偗庢傝傑偡丅僙儞僒偼丄拞墰丄塃丄嵍丄偺俁売強偵愝抲偟偰偄傞堊丄偦偺俁屄偺僙儞僒偺忬嫷偵崌傢偣偰丄嵍塃偺儌乕僞乕(僞僀儎)傪摦嶌偝偣傑偡丅
帠慜弨旛
昁梫側暔傪懙偊傞
傑偢偼昁梫側暔傪懙偊傑偡丅
惂屼僾儘僌儔儉偼傾僾儕働乕僔儑儞僾儘僌儔儉偲堘偭偰丄僷僜僐儞忋偱偼摦偒傑偣傫丅摦偐偡暔乮崱夞偼P-ROBO乯偑昁梫偵側傝傑偡丅偦偺拞乮P-ROBO乯偱帺暘偺嶌偭偨僾儘僌儔儉偑摦嶌偡傞偺偱偡丅
侾丏俹俠乮俢俷俽乛倁儅僔儞乯
偙傟偑側偄偲榖偵側傜側偄偱偡偹丅
偟偐偟丄俢俷俽乛倁儅僔儞偱側偄偲摦嶌偟傑偣傫丅
俹俠俋俉僔儕乕僘偺曽偼摦嶌偄偨偟傑偣傫偺偱偁偟偐傜偢丒丒丒丅
俀丏俹亅俼俷俛俷杮懱乮侾戜乯
俁丏俠俢亅俼俷俵乽俹亅俼俷俛俷乿乮侾枃乯
俹亅俼俷俛俷偲堦弿偵偮偄偰偔傞偺偱偛怱攝側偔

係丏捠怣働乕僽儖乮侾杮乯
僆僾僔儑儞偱偡丅俹亅俼俷俛俷傪攦偆偲偒偵堦弿偵峸擖偟傑偟傚偆丅

俆丏俹俬俠丂俠丂僐儞僷僀儔
俠尵岅偱惂屼偡傞応崌偵昁梫偱偡丅傾僙儞僽儔偱惂屼偡傞偵偼昁梫側偄偺偱偡偑丄杮僐儞僥儞僣偼俠尵岅偱偺惂屼傪峫偊偰偄傞偺偱昁梫偵側傝傑偡丅
丒丒丒偪側傒偵俠尵岅偺抦幆傕昁梫偱偡丅
娐嫬偺愝掕傪峴偆
昁梫側暔偑偦傠偭偨傜丄偦傟傜傪巊偊傞傛偆偵愝掕傪峴偄傑偡丅傑偢偼僜僼僩僂僃傾偺僀儞僗僩乕儖偱偡丅
乽俹亅俼俷俛俷倁侾俈丏俤倃俤乿仼傪幚峴丅
師偵俹俬俠丂俠丂僐儞僷僀儔傪僀儞僗僩乕儖偟傑偡丅偙傟偱俠尵岅傪巊梡偟偨惂屼偑壜擻偵側傝傑偡丅
乽俬俶俽俿俙俴俴丏俤倃俤乿仼傪幚峴丅
偙傟偱僀儞僗僩乕儖偼姰椆偱偡丅僄僨傿僞偼奺帺偱梡堄偟偰偔偩偝偄丅